Toyota Corolla: BSM (Blind Spot Monitor) / Blind Spot Monitor operation
■ Vehicles that can be detected by the Blind Spot Monitor
The Blind Spot Monitor uses rear side radar sensors to detect the following vehicles traveling in adjacent lanes and advises the driver of the presence of such vehicles via the indicators on the outside rear view mirrors.
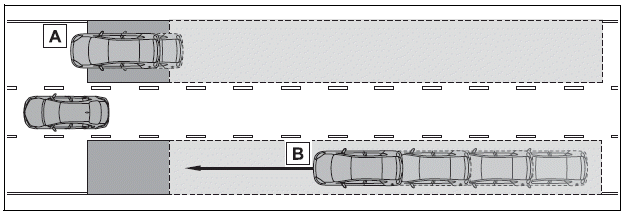
A - Vehicles that are traveling in areas that are not visible using the outside rear view mirrors (the blind spots)
B - Vehicles that are approaching rapidly from behind in areas that are not visible using the outside rear view mirrors (the blind spots)
■ The Blind Spot Monitor detection areas
The areas that vehicles can be detected in are outlined below.
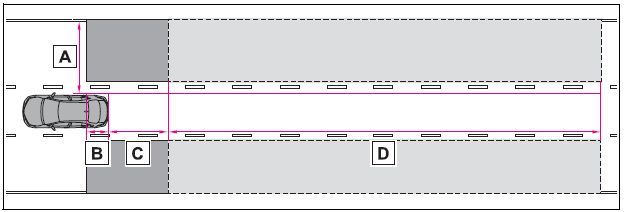
The range of each detection area is:
A - Approximately 1.6 ft. (0.5 m) to 11.5 ft. (3.5 m) from either side of the vehicle
B - Approximately 3.3 ft. (1 m) forward of the rear bumper
C - Approximately 9.8 ft. (3 m) from the rear bumper
D - Approximately 9.8 ft. (3 m) to 197 ft. (60 m) from the rear bumper
■The Blind Spot Monitor is operational when
The Blind Spot Monitor is operational when all of the following conditions are met:
- The Blind Spot Monitor is on.
- The shift lever is in a position other than R.
- The vehicle speed is greater than approximately 10 mph (16 km/h).
■The Blind Spot Monitor will detect a vehicle when
The Blind Spot Monitor will detect a vehicle present in the detection area in the following situations:
- A vehicle in an adjacent lane overtakes your vehicle.
- You overtake a vehicle in adjacent lane slowly.
- Another vehicle enters the detection area when it changes lanes.
■Conditions under which the Blind Spot Monitor will not detect a vehicle
The Blind Spot Monitor is not designed to detect the following types of vehicles and/or objects:
- Small motorcycles, bicycles, pedestrians, etc.*
- Vehicles traveling in the opposite direction
- Guardrails, walls, signs, parked vehicles and similar stationary objects*
- Following vehicles that are in the same lane*
- Vehicles traveling 2 lanes away from your vehicle*
- Vehicles which are being overtaken rapidly by your vehicle
■Conditions under which the Blind Spot Monitor may not function correctly
- The Blind Spot Monitor may not detect vehicles correctly in the following
situations:
- When the sensor is misaligned due to a strong impact to the sensor or its surrounding area
- When mud, snow, ice, a sticker, etc. is covering the sensor or surrounding area on the rear bumper
- When driving on a road surface that is wet with standing water during bad weather, such as heavy rain, snow, or fog
- When multiple vehicles are approaching with only a small gap between each vehicle
- When the distance between your vehicle and a following vehicle is short
- When there is a significant difference in speed between your vehicle and the vehicle that enters the detection area
- When the difference in speed between your vehicle and another vehicle is changing
- When a vehicle enters a detection area traveling at about the same speed as your vehicle
- As your vehicle starts from a stop, a vehicle remains in the detection area
- When driving up and down consecutive steep inclines, such as hills, dips in the road, etc.
- When driving on roads with sharp bends, consecutive curves, or uneven surfaces
- When vehicle lanes are wide, or when driving on the edge of a lane, and the vehicle in an adjacent lane is far away from your vehicle
- When an accessory (such as a bicycle carrier) is installed to the rear of the vehicle
- When there is a significant difference in height between your vehicle and the vehicle that enters the detection area
- Immediately after the Blind Spot Monitor is turned on
- Instances of the Blind Spot Monitor unnecessarily detecting a vehicle and/or
object may increase in the following situations:
- When the sensor is misaligned due to a strong impact to the sensor or its surrounding area
- When the distance between your vehicle and a guardrail, wall, etc. that enters the detection area is short
- When driving up and down consecutive steep inclines, such as hills, dips in the road, etc.
- When vehicle lanes are narrow, or when driving on the edge of a lane, and a vehicle traveling in a lane other than the adjacent lanes enters the detection area
- When driving on roads with sharp bends, consecutive curves, or uneven surfaces
- When the tires are slipping or spinning
- When the distance between your vehicle and a following vehicle is short
- When an accessory (such as a bicycle carrier) is installed to the rear of the vehicle
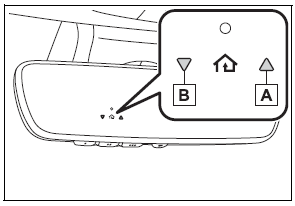
 System components
System components
A - Meter control switches
Turning the Blind Spot Monitor on/off.
B - Outside rear view mirror indicators
When a vehicle is detected in a blind spot of the outside rear view mirrors or
approaching rapidly from behind into a blind spot, the outside rear view mirror
indicator on the detected side will illuminate...
 RCTA (Rear Cross Traffic Alert) function
RCTA (Rear Cross Traffic Alert) function
The RCTA function uses the BSM rear side radar sensors installed behind the rear
bumper. This function is intended to assist the driver in checking areas that are
not easily visible when backing up...
Other information:
Toyota Corolla 2019-2026 Owners Manual: Outside rear view mirrors
The rear view mirror’s position can be adjusted to enable sufficient confirmation of the rear view. WARNING ■Important points while driving Observe the following precautions while driving. Failure to do so may result in loss of control of the vehicle and cause an accident, resulting in death or serious injury...
Toyota Corolla 2019-2026 Owners Manual: Changing the meter display
The multi-information display is operated using the meter control switches. A - : Select menu icons<> : Change displayed content, scroll up/down the screen and move the cursor up/down B - Press: Enter/Set Press and hold: Reset/Display customizable items C - Return to the previous screen D - Call sending/receiving and history display Linked with the hands-free system, sending or receiving ..
Categories
- Manuals Home
- 12th Generation Corolla Owners Manual
- Electric parking brake
- Lubrication system (2.0 L 4-cylinder [M20A-FKS] engine)
- Transfer contacts from device
- New on site
- Most important about car
Operating HomeLink
Press the appropriate Home- Link® button. The HomeLink® indicator light should turn on.
The status of the opening and closing of a garage door is shown by the indicators.